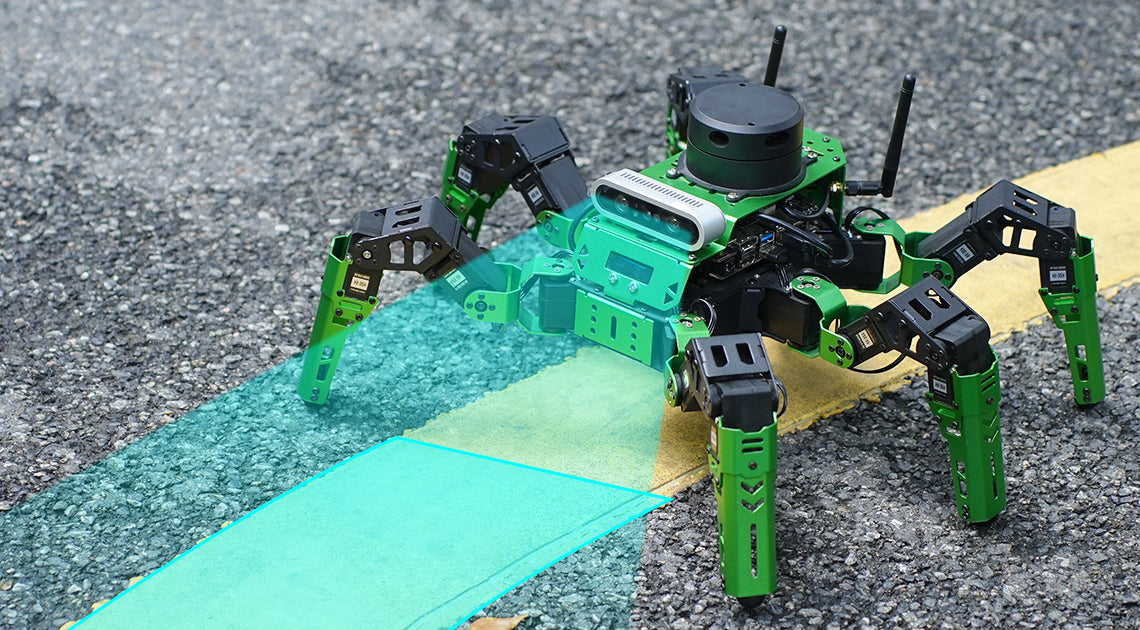
JetHexa ROS Hexapod Robot Kit Powered by Jetson Nano with Lidar Depth Camera Support SLAM Mapping and Navigation
 Product Description
Product Description
JetHexa is a hexapod robot powered by NVIDIA Jetson Nano B01 and supports Robot Operating System (ROS). It leverages mainstream deep learning frameworks, uses OpenCV for image processing, incorporates MediaPipe development, enables YOLO model training, and utilizes TensorRT acceleration.
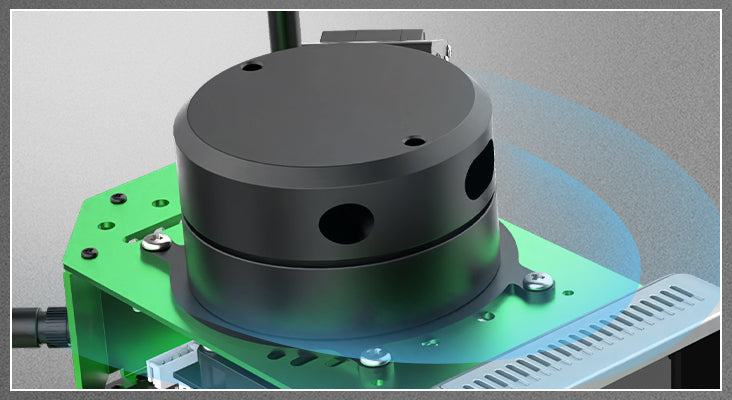
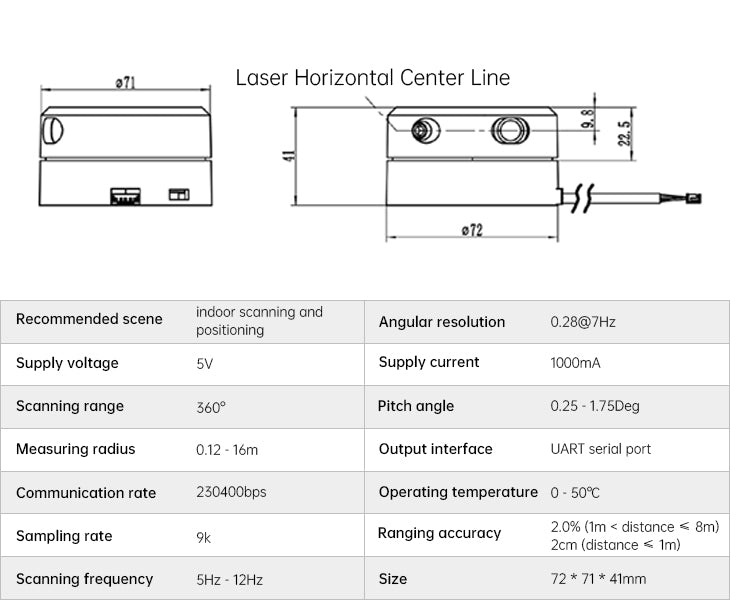
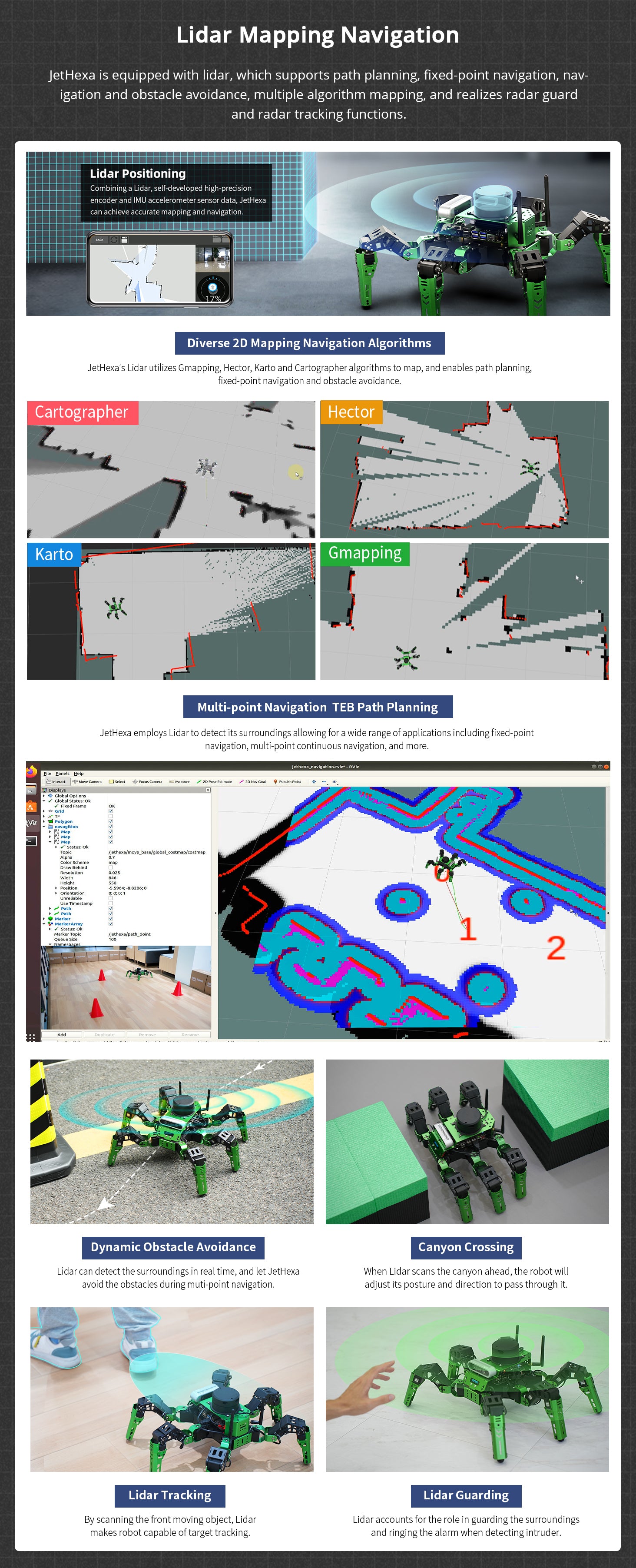
Equipped with Lidar & Supports SLAM Mapping Navigation
It is driven by an intelligent serial bus servo which provides over-temperature protection and antiblocking function. lts up to 240° rotation range extends JetHexa's exploration ranges.

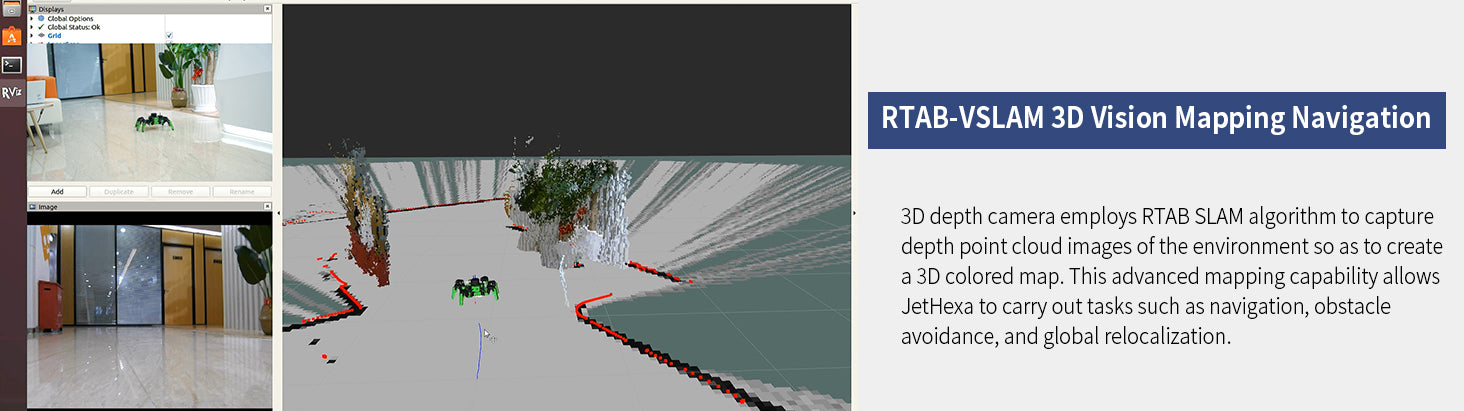
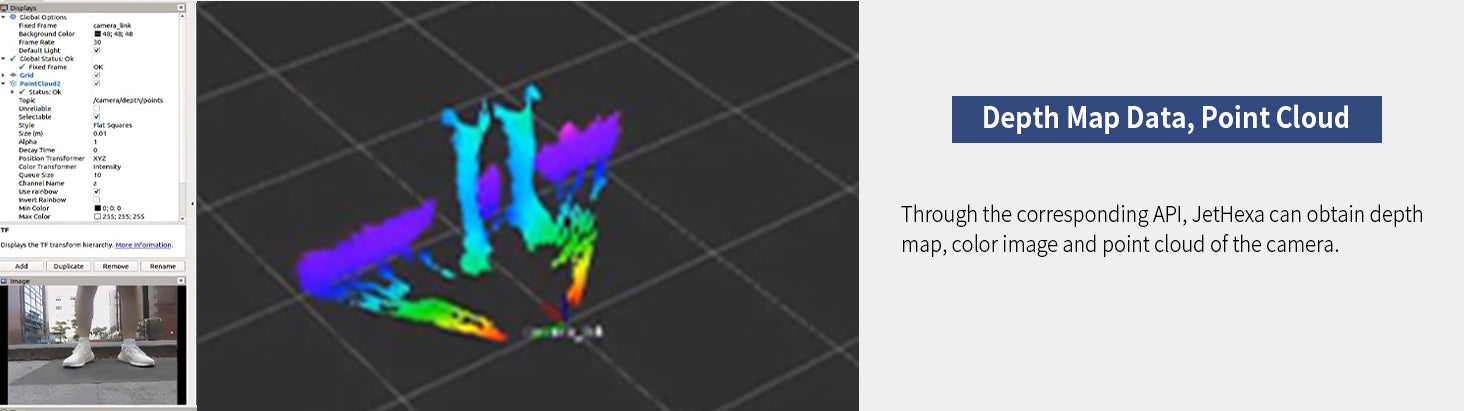
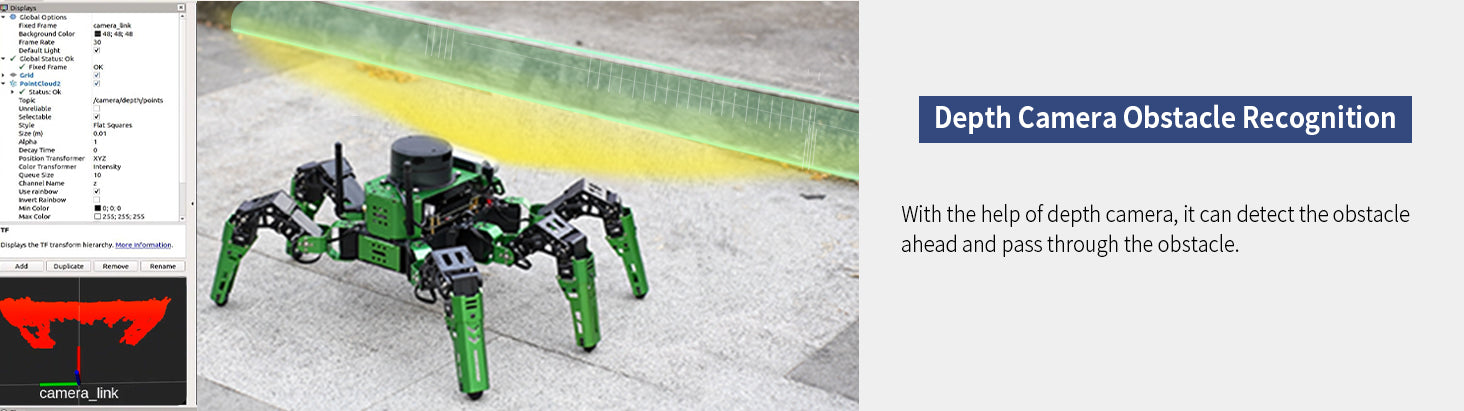
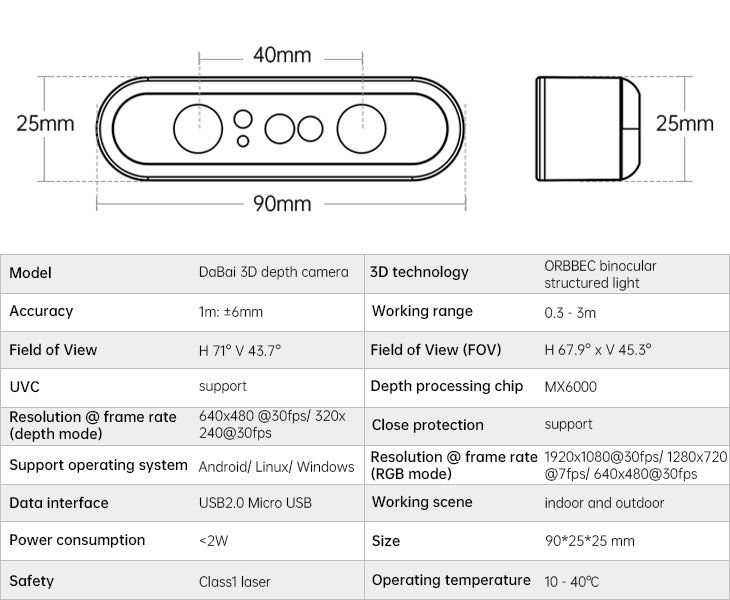
3D Depth Camera & Depth Image Processing
The 3D depth camera can not only realize AI visual game-play, but also enable advanced gameplay such as depth image data processing and 3D visual mapping navigation.
6CH Far-field Microphone Array
The 6CH far-field microphone array and speakers support sound source positioning, voice recognition control, voice navigation and other functions.

Intelligent Bus Servo
JetHexa is equipped with a 35KG high-torque smart bus servo, which has high precision, feedback, and convenient wiring.
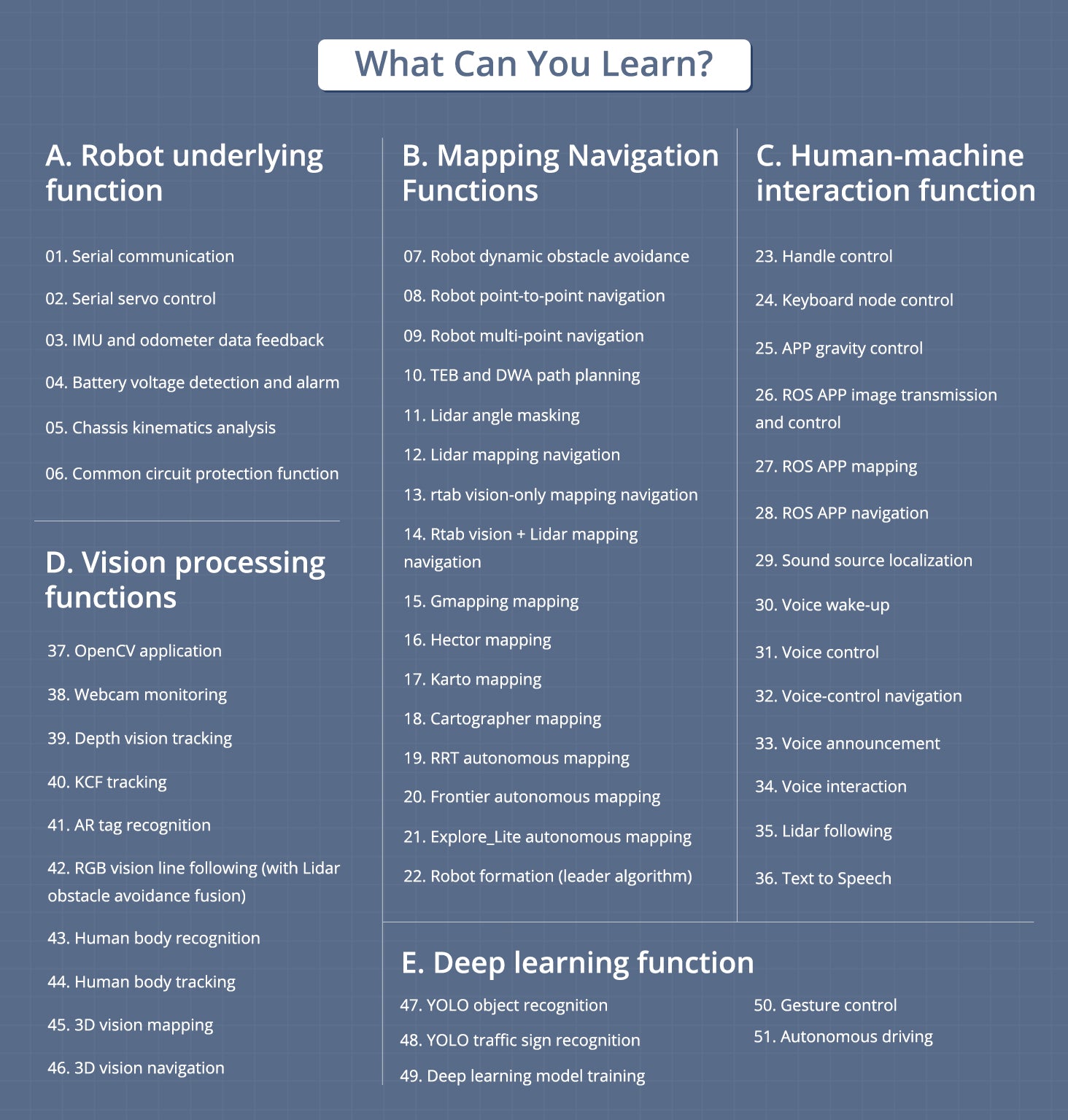
Function List

3D Vision AI Upgraded Interaction
JetHexa is equipped with a 3D depth camera, supports 3D vision mapping and navigation, and can obtain 3D point cloud images. Through deep learning, it can realize more AI vision interactive gameplay.
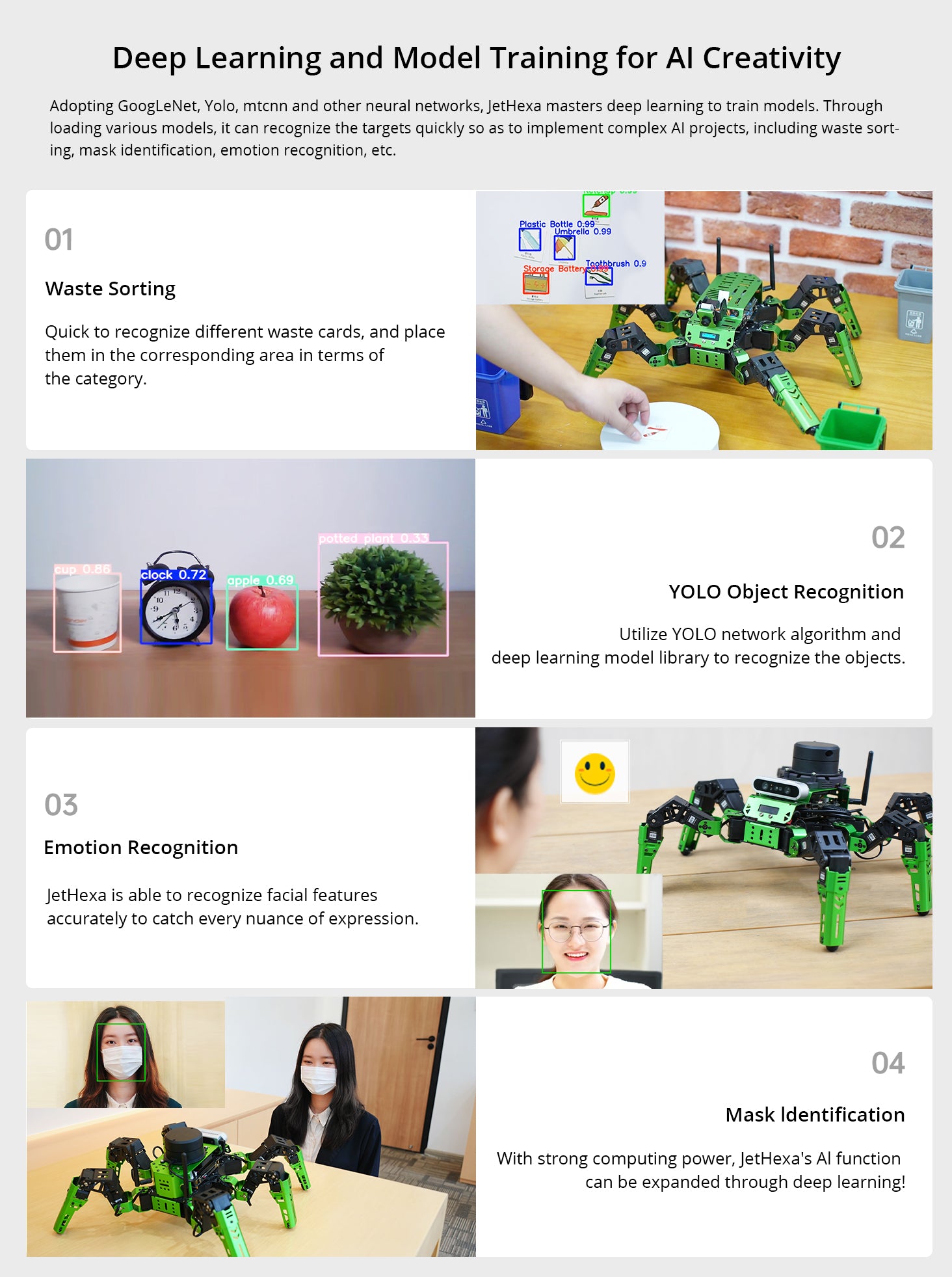
AI Vision Interaction
By incorporating artificial intelligence, JetHexa can implement KCF target tracking, vision line following, color/ tag recognition and tracking, etc.

Color Recognition and Tracking
Skilled in color recognition and tracking, the robot can be set to execute different actions according to the colors.
Vision Line Following
JetHexa supports custom color selection, and the robot can identify color lines and follow them.

KCF Target Tracking
Relying on KCF filtering algorithm, the robot can track the selected target.
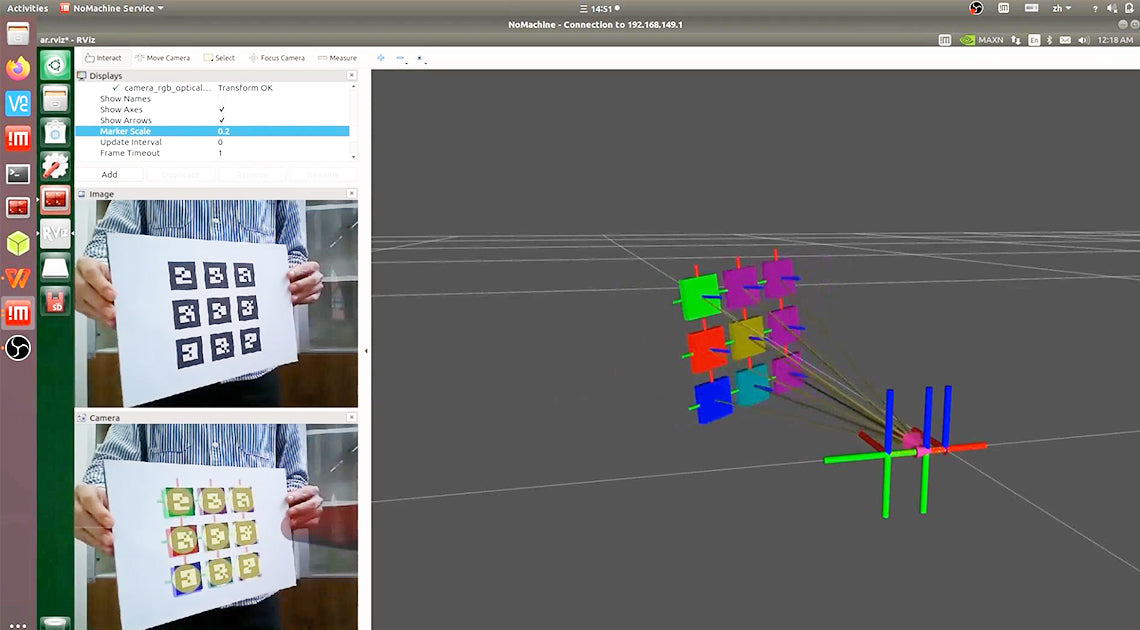
Tag Recognition and Tracking
JetHexa is able to recognize and track the designated color, and can recognize multiple April Tags and their coordinates at the same time.
MediaPipe Development, Upgraded AI Interaction
JetHexa utilizes MediaPipe development framework to accomplish various functions, such as human body recognition, fingertip recognition, face detection, and 3D detection.

Fingertip Trajectory Recognition
6CH Circular Microphone Array
This 6CH circular microphone array is adroit at far-field sound source localization, voice recognition and voice interaction. In comparison to ordinary microphone module,it can implement more advanced functions.


Sound Source Localization & Sound Awakening
Combined with 6-ch microphone array, JetHexa achieves high-precision noise-reduced sound source localization. Coupled with Lidar's distance recognition function, you can wake the robot from any position.

TTS Speech Broadcast
The microphone array provide Text To Speech function, allowing the conversion of text content published by ROS into speech. This facilitates the design of man-machine interaction projects.

Voice Interaction
The combination of voice recognition and TTS speech broadcast enables voice interaction. Moreover, the module supports iFLYTEK's online voice chat.

Voice-Controlled Navigation
Users can control JetHexa using voice commands to navigate to specific positions on the constructed map. This function is reminiscent of a food delivery robot.
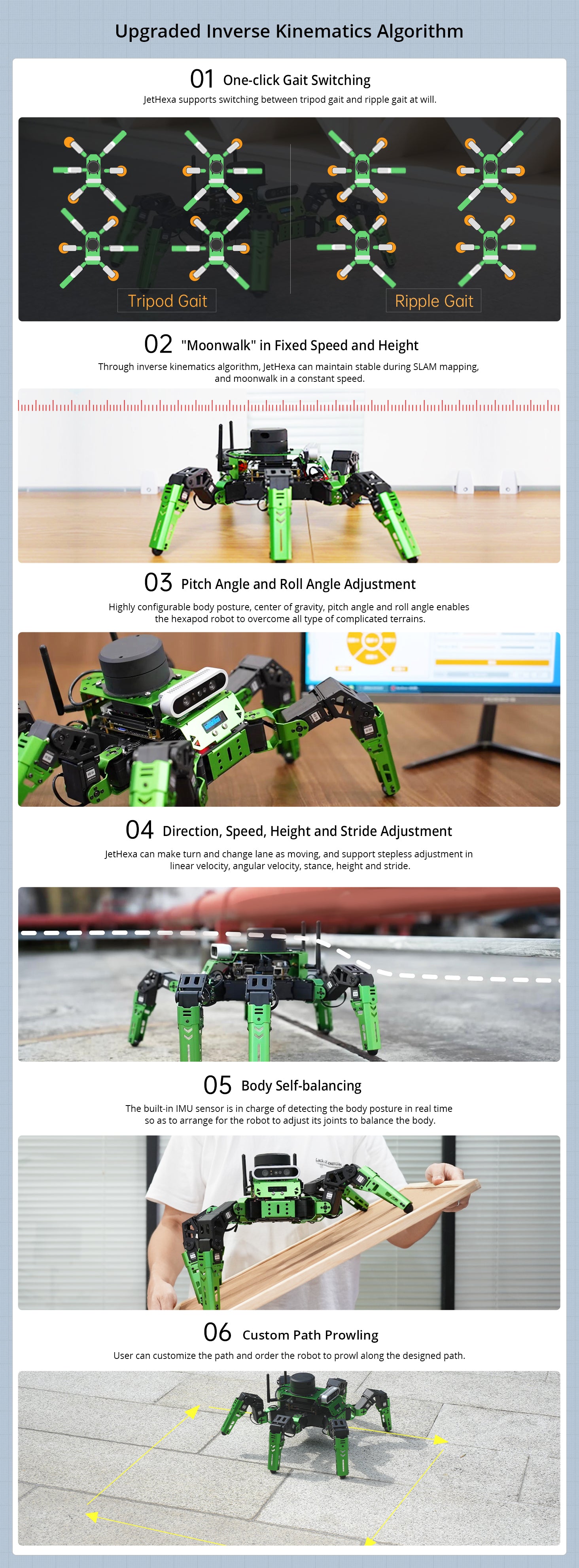
Intelligent Formation Autonomous Adjustment
JetHexa can realize multi-aircraft group control, intelligent formation, and synchronized performances. In addition, JetHexa also supports custom path prowling, canyon crossing, and autonomous adjustment of driving posture and direction.

Group Control
A group of JetHexa can be controlled by only one wireless handle to perform actions uniformly and simultaneously.

Intelligent Formation
A batch of JetHexa can maintain the formation,including horizontal line, vertical line and triangle,during moving.
ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.

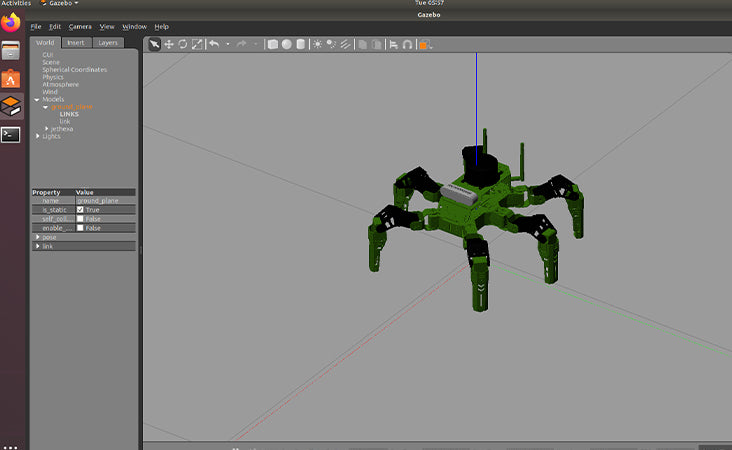
Gazebo Simulation
JetHexa is built on the Robot Operating System (ROS) and integrates with Gazebo simulation. This enables effortless control of the robot in a simulated environment, facilitating algorithm prevalidation to prevent potential errors. Gazebo provides visual data, allowing you to observe the motion trajectories of each endpoint and center. This visual feedback facilitates algorithm enhancement.
Body Simulation Control
Through robot simulation control, algorithm verification of mapping navigation can be carried out to improve the iteration speed of the algorithm and reduce the cost of trial and error.
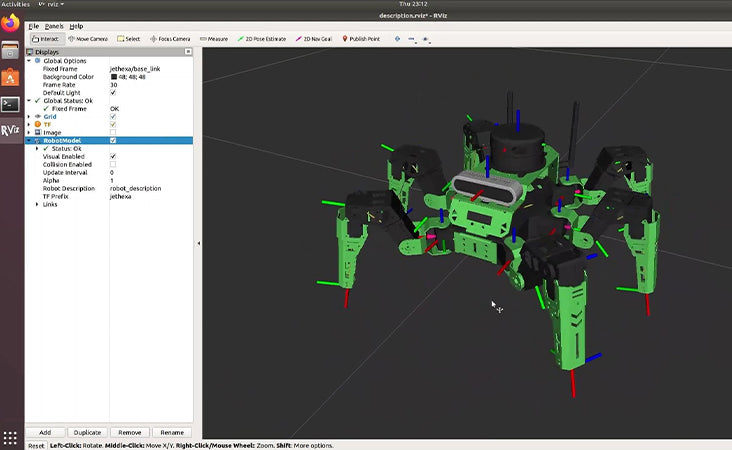
Rviz Shows URDF Model
Provide an accurate URDF model, and observe the mapping navigation effect through the Rviz visualization tool to facilitate debugging and improving algorithms.


HX-35H Serial Bus Servo
HX-35H is a serial bus high voltage servo with 35kg strong torque. lt can provide temperature and voltage feedback for long service life. The adopted highaccuracy potentiometer and metal gear contributes to greater performance.

Multi-functional Expansion Board
The expansion board has a built-in IMU sensor which can detects robot posture in real time. There are 2-channel PWM, two keys, a LED, a buzzer, 9-channel serial bus servo interface, two GPIO expansion ports and two llC interfaces on it.
Jetson allows you to run multiple neural networks, object detection, segmentation and speech processing applications in parallel.
Removable lithium battery
The fuselage has a built-in 11.1V 3500mAh large-capacity removable lithium battery to improve the robot's endurance.
Display the controller properties and battery voltage in real time and supports custom setting.
Robot's metal bracket is finely anodized for delicate appearance and long service life
Specification Parameters
| Weight: |
2.5kg |
| Material: |
Full-metal hard aluminum alloy bracket(anodized) |
| Battery: |
11.1V 3500mAh 5C Lipo battery |
| Continuous working life: |
60min |
| Hardware: |
ROS controller and ROS expansion board |
| Operating system: |
Ubuntu 18.04 LTS + ROS Melodic |
| Software: |
PC software + iOS/ Android APP |
| Communication: |
USB/ WiFi / Ethernet |
| Programming language: |
Python/ C/ C++/ JavaScript |
| Storage: |
32GB TF card |
| Servo: |
HX-35H intelligent serial bus servo |
| Control method: |
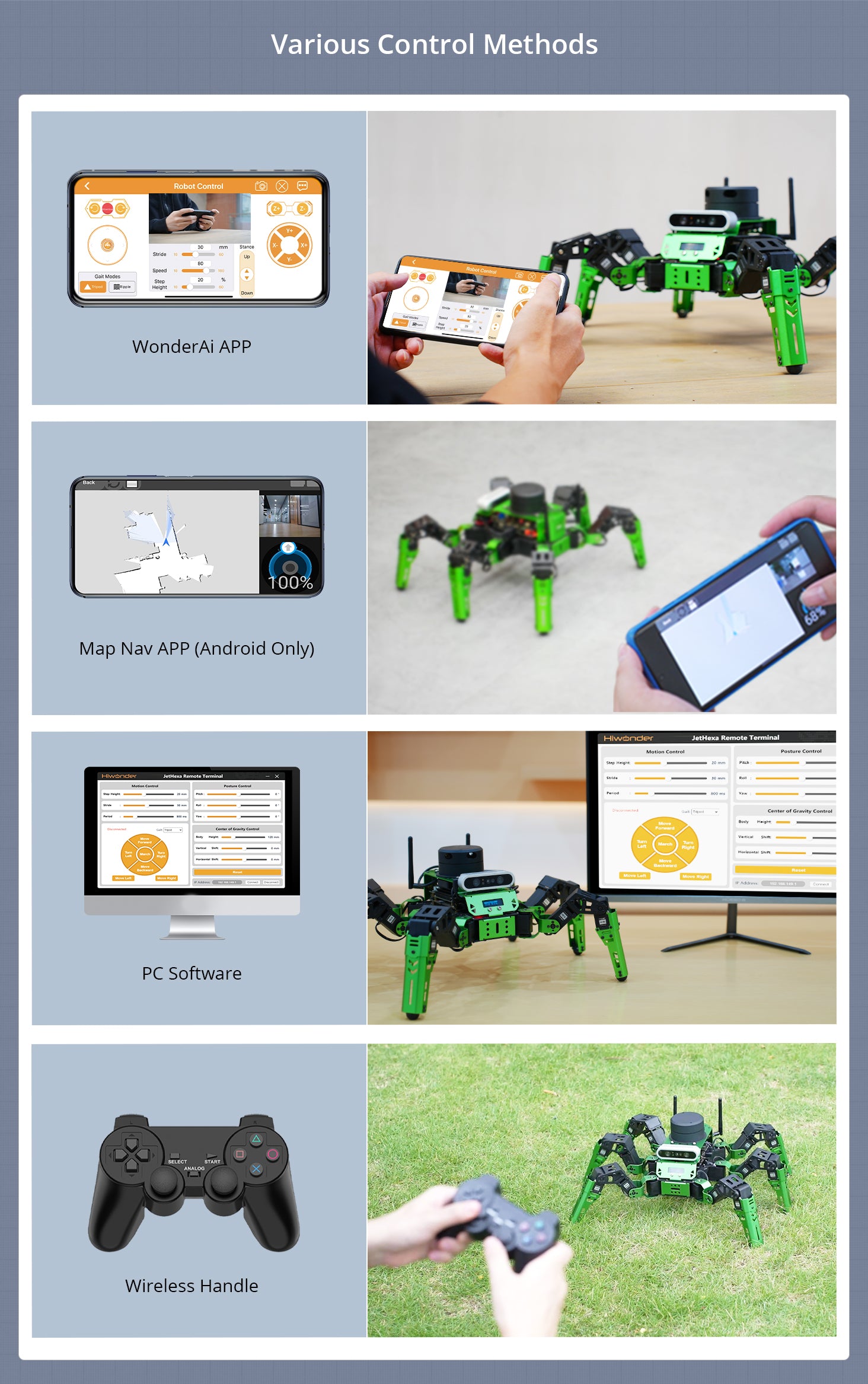
Computer/ phone/ handle control |
| Package size (advanced kit): |
387* 356* 210mm (length*width*height) |
| Package weight (advanced kit): |
About 3.6kg |

6-CH Circular Microphone Array
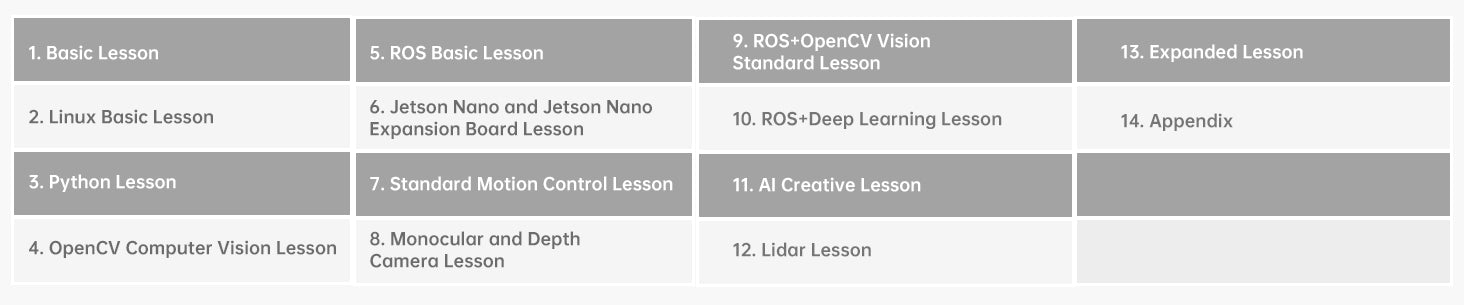
Abundant Learning Materials
JetHexa Standard Packing List

JetHexa Advanced Packing List (SLAMTEC C1 Lidar)

JetHexa Advanced Packing List (EAI G4 Lidar)

Specifications
| Item |
Specification |
| Product weight |
2.5kg |
|
| Material |
Full-metal hard aluminum alloy bracket (anodized) |
|
| Battery |
11.1V 3500mAh 5C Lipo battery |
|
| Continuous working life |
60min |
|
| Hardware |
ROS controller and ROS expansion board |
|
| Operating system |
Ubuntu 18.04 LTS + ROS Melodic |
|
| Software |
PC software + iOS/ Android app |
|
| Communication |
USB/ WiFi / Ethernet |
|
| Programming language |
Python/ C/ C++/ JavaScript |
|
| Storage |
32GB TF card |
|
| Servo |
HX-35H intelligent serial bus servo |
|
| Control method |
Computer/ phone/ handle control |
|
| Package size (advanced kit) |
387* 356* 210mm (length*width*height) |
|
| Package weight (advanced kit) |
About 3.6kg |
|